4-DOF Robot Arm
Published on: December 15, 2024 5 min read
Robotics CAD Mechanical Design
Overview
This robotic arm project demonstrates advanced mechanical design principles and precision engineering. The arm consists of four main joints that provide comprehensive movement capabilities, allowing for complex manipulation tasks in industrial or research settings.
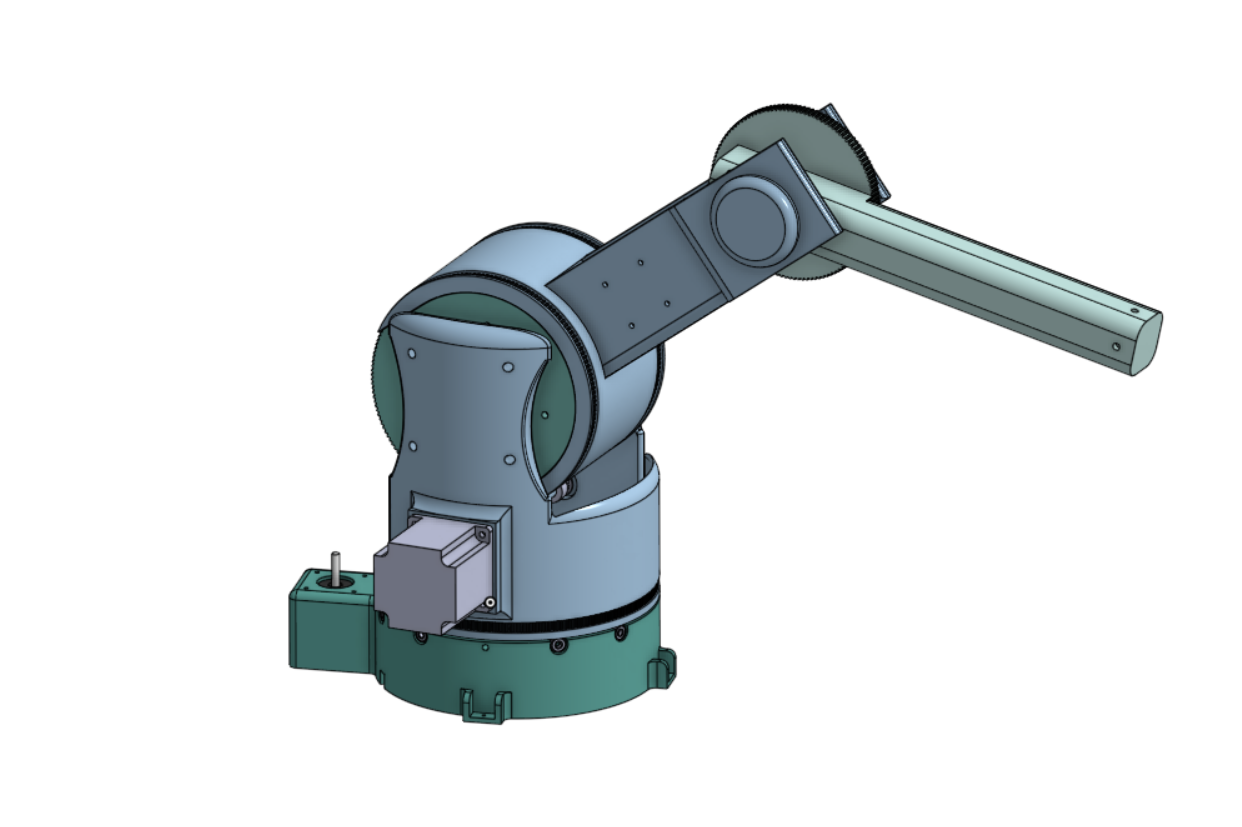
A 4-DOF (Degrees of Freedom) robot arm designed and modeled using CAD software, featuring precise articulation and robust construction for various automation applications.
Overview
This robotic arm project demonstrates advanced mechanical design principles and precision engineering. The arm consists of four main joints that provide comprehensive movement capabilities, allowing for complex manipulation tasks in industrial or research settings.
Design Features
- Base Joint (Waist): Cylindrical base with secure mounting points and integrated control housing
- Shoulder Joint: Light blue cylindrical section with gear housing for smooth rotational movement
- Elbow Joint: Articulated arm segment with gear mechanisms for precise positioning
- End Effector Mount: Forearm section with attachment points for various tools and grippers
Technical Specifications
- Degrees of Freedom: 4-DOF
- Construction: Teal, light blue, and light grey components
- Mounting: Secure base with multiple bolt points
- Articulation: Gear-driven joints for smooth, precise movement
Technologies Used
- CAD Design Software
- Mechanical Engineering Principles
- Robotic Kinematics
- Precision Manufacturing